基于实车在环VIL的驾驶辅助系统测试技术及应用
随着汽车智能化、网联化浪潮的推进,高级驾驶辅助系统(ADAS)和自动驾驶系统的功能日益复杂,对其安全性、可靠性的验证提出了前所未有的挑战。传统的实车道路测试成本高昂、周期漫长、场景覆盖有限且存在安全风险,而纯虚拟仿真测试则难以完全模拟真实世界的物理交互与传感器特性。在此背景下,实车在环(Vehicle-in-the-Loop, VIL)测试技术应运而生,它通过将真实车辆与虚拟仿真环境深度融合,构建了一个高效、安全、可复现的测试验证平台,正成为驱动驾驶辅助系统开发与验证的关键技术。
一、VIL测试技术的核心原理与系统构成
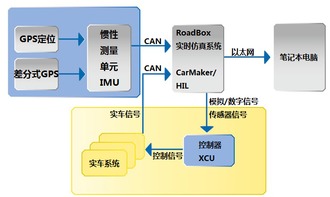
实车在环测试的核心思想是“虚实结合”。它将真实的被测车辆置于受控的实验室环境(如转鼓试验台或封闭场地)中,车辆的真实执行器(转向、制动、油门)和传感器(摄像头、雷达等)保持工作状态。通过高精度车辆动力学模型、高保真的虚拟交通场景以及传感器物理仿真模型,实时生成与车辆动作相匹配的虚拟环境信息,并注入(Inject)到车辆的传感器或控制器中。这样,车辆“感知”到的是一个由计算机生成的、可精确控制的虚拟世界,并据此做出真实的决策与控制响应,其响应又反馈回仿真系统,形成闭环。
一个完整的VIL测试系统通常由以下几个关键部分构成:
- 真实车辆平台:包含完整的线控底盘、传感器套件及待测的ADAS/自动驾驶域控制器。
- 车辆操控平台:多为底盘测功机(转鼓试验台),用于承载真实车辆,模拟车辆与路面的纵向动力学交互,并允许车辆真实驱动轮旋转。
- 实时仿真与管理系统:这是系统的“大脑”,运行高精度的车辆动力学模型、交通场景模型、道路环境模型以及传感器物理模型。它需要具备强大的实时计算能力,确保仿真步长足够小,以跟上真实车辆的控制节奏。
- 传感器模拟与注入系统:这是“虚实结合”的桥梁。对于摄像头,可能采用屏幕投影或直接视频流注入;对于雷达,采用射频信号仿真与注入设备;对于激光雷达,采用回波信号模拟。该系统将仿真环境中的目标信息,转化为真实传感器可接收的物理信号,输入给车辆。
- 数据采集与同步系统:用于同步记录来自真实车辆总线(CAN、以太网等)的数据和仿真系统的数据,为后续分析提供依据。
二、核心测试技术优势
相较于纯实车测试和纯仿真测试,VIL测试技术展现出独特的优势:
- 安全性与可重复性:危险场景(如高速追尾、行人横穿)可在虚拟环境中无限次、安全地复现,消除了实车测试的人员与财产风险。测试条件可精确复现,便于问题排查与回归测试。
- 场景覆盖与扩展性:可轻松构建海量、极端、罕见的长尾场景,包括各种天气、光照、交通参与者行为组合,极大扩展了测试的覆盖范围与效率。
- 成本与效率:大幅减少了实车路测的里程需求、人力物力消耗以及时间成本,使得在开发早期进行密集迭代测试成为可能。
- 深度可控与可观测性:测试人员可以完全控制虚拟环境中的每一个变量,并可以无干扰地观测车辆内部所有控制信号与状态,这是实车测试难以做到的。
三、在计算机软硬件及辅助设备领域的应用与挑战
VIL测试的落地与效能提升,高度依赖于先进的计算机软硬件及专用辅助设备。
在硬件方面:
1. 高性能实时计算平台:需要多核高性能CPU、GPU以及实时操作系统,以并行运行复杂的物理模型、渲染高画质场景并保证确定的低延迟。
2. 高精度车辆操控与测量设备:高动态响应的底盘测功机、高精度惯导测量单元(IMU)、轮速与扭矩测量传感器等,是准确模拟车辆动力学和获取车辆真实状态的基础。
3. 高保真传感器仿真设备:这是技术难点与关键。例如,毫米波雷达目标模拟器需要能在射频前端模拟多个动态目标的距离、速度、角度信息;摄像头注入系统需要解决延迟、图像逼真度与光学标定等问题。这些专用设备构成了VIL系统的核心价值与壁垒。
在软件方面:
1. 高精度多物理场耦合仿真模型:包括轮胎-路面模型、车辆多体动力学模型、传感器物理特性模型(如雷达波束模式、摄像头光学畸变与噪声)等,其精度直接决定测试结果的可信度。
2. 场景生成与管理软件:支持OpenSCENARIO、OpenDRIVE等标准格式,能够编辑、随机生成、批量管理和回放复杂的测试场景。
3. 集成开发与自动化测试框架:提供友好的用户界面,将硬件在环、VIL、云仿真等不同测试手段集成到统一的工具链中,支持测试用例的自动化执行、结果自动评估与报告生成。
面临的挑战主要包括:传感器物理仿真(特别是激光雷达和复杂环境下的摄像头)的逼真度仍有待提升;多传感器时空同步与低延迟注入技术难度高;整个VIL系统的集成复杂度高,标定与维护工作量大;测试用例的有效性评估与通过标准仍需行业共识。
四、
基于实车在环(VIL)的测试技术,凭借其虚实融合的独特优势,已成为验证智能驾驶系统功能安全与预期功能安全不可或缺的一环。它的发展紧密依赖于计算机仿真软件、实时计算硬件以及高精专用测试设备的协同进步。随着相关软硬件技术的不断成熟与标准化,VIL测试将在提升自动驾驶系统研发效率、加速其安全可靠落地方面,发挥越来越核心的作用,是连接虚拟仿真与最终实车认证之间的关键桥梁。
如若转载,请注明出处:http://www.weishuiwang1.com/product/75.html
更新时间:2026-06-19 15:55:08